


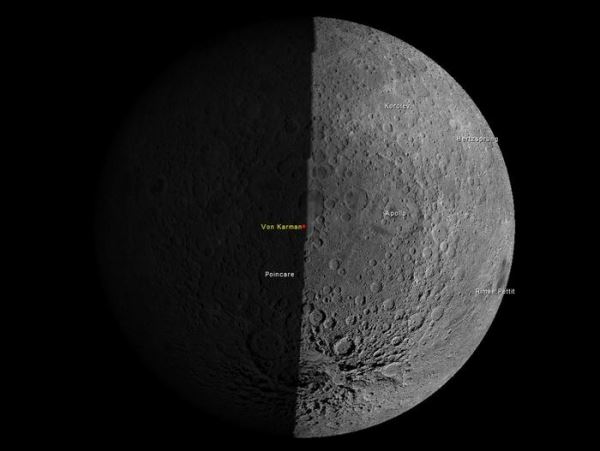
Как летит время! Уже наступил четвертый земной месяц работы на обратной стороне Луны посадочного модуля «Чанъэ-4» и ровера «Юйту-2». Аппараты пережили период крайне низкотемпературной среды в третью лунную ночь, сейчас они вышли из спящего режима и приступили к новым исследованиям поверхности Луны и космического пространства.
Какие камеры установлены на модуле «Чанъэ-4» и ровере «Юйту-2» и что снимают аппараты длинными лунными днями?
Ранее опубликованные материалы про миссию «Чанъэ-4»:
На данный момент прошло 88 суток (2212 часов) после высадки ровера «Юйту-2» на Лунную поверхность и 115 суток (2760 часов) после запуска с космодрома Сичан ровера «Юйту-2» в составе миссии «Чанъэ-4» на Луну.
Четвертый лунный день на обратной стороне Луны:
Планируемая продолжительность работы посадочного модуля составляет один год, ровера — три месяца.
Фактически, ровер «Юйту-2» уже выработал свой расчетный рабочий ресурс в 2160 часов.
Это не рекорд для лунных миссий «Чанъэ», первый посадочный аппарат «Чанъэ-3», находящийся на видимой части Луны с декабря 2013 года, до сих пор подает признаки жизни (телеметрию и данные с разных приборов), а вот его напарник по этой высадке — первый ровер «Юйту», хоть и потерял подвижность спустя 40 суток после начала продуктивной работы на лунной поверхности, до середины 2016 года передавал в ЦУП данные в стационарном режиме.
Данные по модулям лунной миссии «Чанъэ-4»:
— спускаемый модуль «Чанъэ-4» (4,4 метра между противоположными посадочными опорами, масса 1200 кг.);
— ровер «Юйту-2» (высота 1 метр, ширина 1 метр (без солнечных батарей), 1,5 метра в длину, две складные солнечные панели, шесть колес, масса 140 кг.).
Новые фотографии с обратной стороны Луны
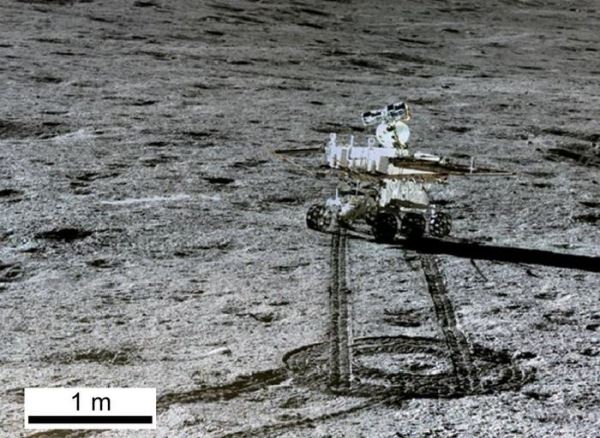
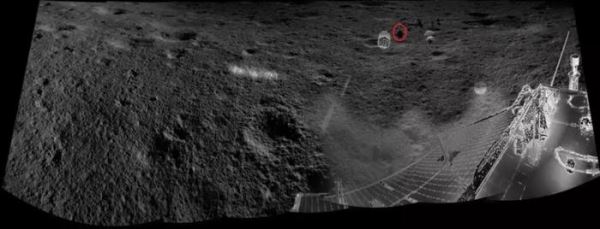
Лунная колея от колес ровера «Юйту-2» и тень от антенны и площадки с панорамной камерой:

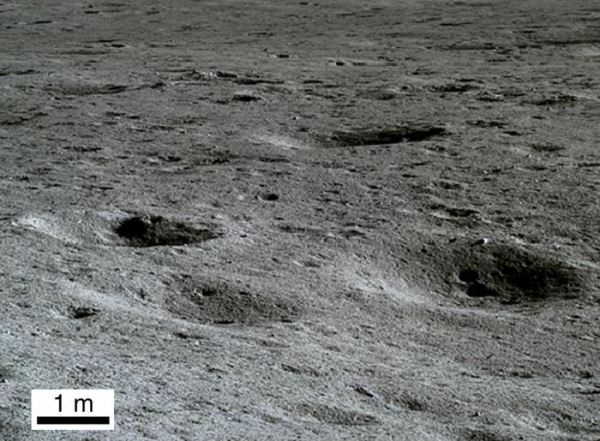
Несколько кратеров (с тенями красиво) и горы на заднем плане:

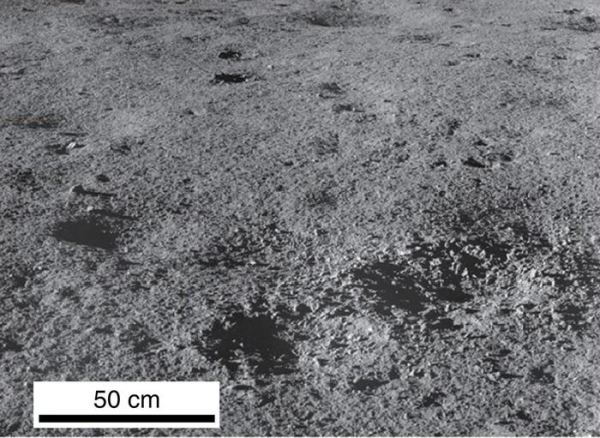
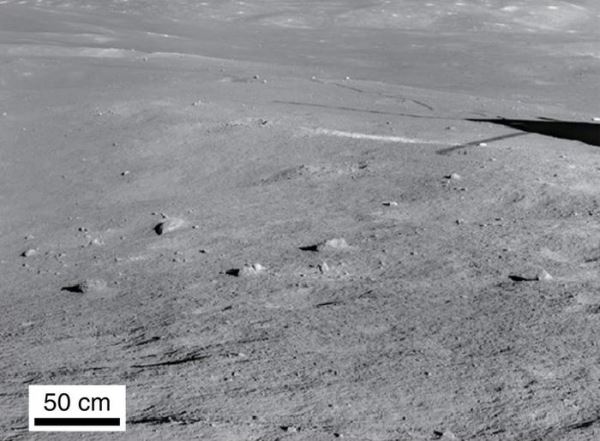
А вот эти фотографии из научной статьи «Lunar farside to be explored by Chang’e-4» апрельского номера журнала «Nature Geoscience».
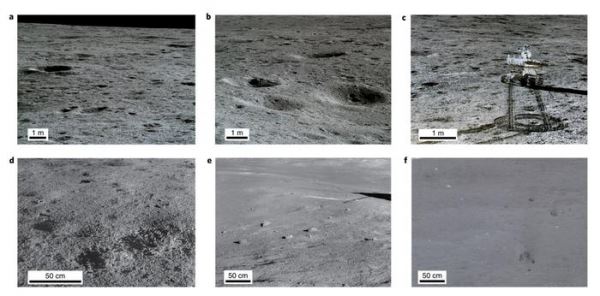
Небольшие кратеры около места посадки:

Ровер «Юйту-2» исследует поверхность Луны:
Осколки камней в небольших кратерах (фото с ровера «Юйту-2»):
Небольшие камни по ходу движения ровера «Юйту-2»:
Очень необычные темные камни около места посадки:

Какие камеры установлены на модуле «Чанъэ-4» и ровере «Юйту-2»?
На посадочном модуль «Чанъэ-4» установлены две камеры:
— посадочная камера (Landing camera — LCAM);
— ландшафтная камера (Terrain camera — TCAM).
Посадочная камера LCAM (0.5 кг, размер 116×100х70.4 мм) установлена на днище модуля «Чанъэ-4», включилась автоматически на высоте 12 км над лунной поверхностью для записи процедуры посадки с разрешением 1024×1024 пикселя, 10 кадров в секунду.
Видео процедуры посадки с камеры LCAM — несколько тысяч кадров собраны в один видеоролик
Характеристики посадочной камеры LCAM:
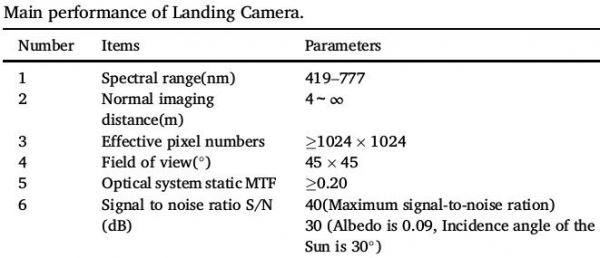
Схема связи элементов посадочной камеры LCAM:
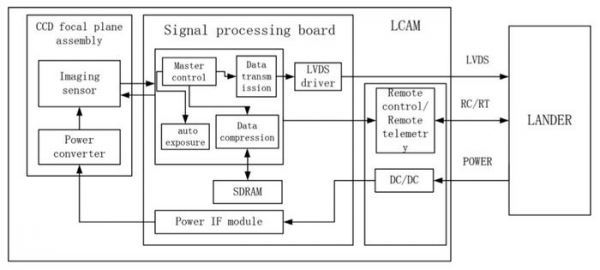
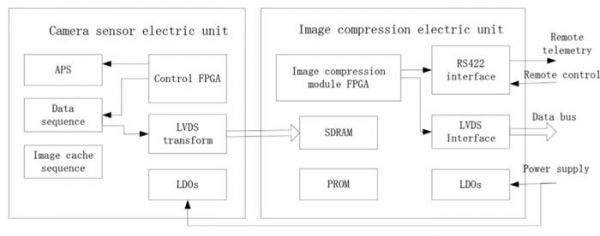
Передача данных осуществляется с помощью интерфейса LVDS (низковольтной дифференциальной передачи сигналов).
После посадки на Луну, камера LCAM фиксирует только один и тот же кадр с посадочной опорой:

Ландшафтная камера TCAM (0.64 кг, размер 92×105х118.9 мм) установлена в самой верхней точке посадочного модуля «Чанъэ-4» на специальном кронштейне, который позволяет камере поворачиваться на 360 градусов вокруг своей оси и может наклонять камеру вверх или вниз на угол до 120 градусов. Панорамные фотографии поверхности и элементов посадочного модуля, сопровождение ровера и изучение местности вокруг зоны посадки — это функции TCAM.
Характеристики ландшафтной камеры TCAM:
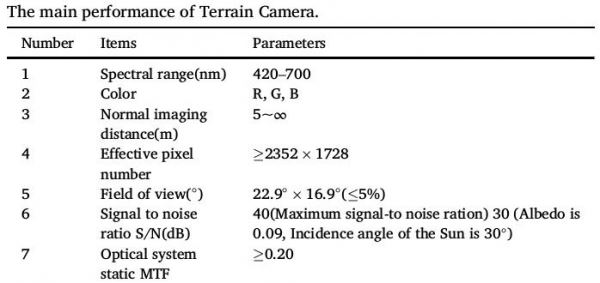
Схема связи элементов ландшафтной камеры TCAM:
Панорама места посадки:

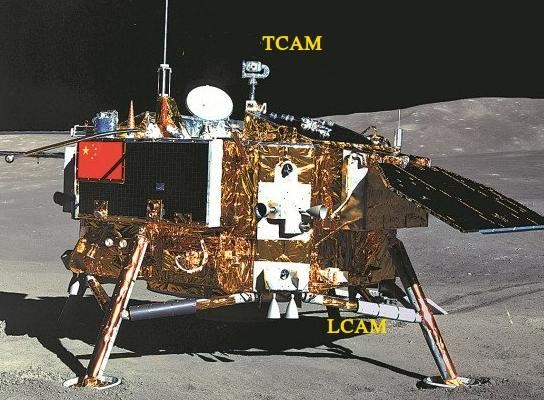
Камеры LCAM и TCAM на посадочном модуле:
Посадочный модуль «Чанъэ-4» работает в стационарном режиме и его фотографии поверхности в зоне посадки в первую очередь очень важны для понимания — какие виды поверхности фактически находятся вокруг модуля. Ведь небольших кратеров и камней там большое количество, а они могут помешать (в худшем случае) процедуре спуска ровера. Так как после посадки, модуль «Чанъэ-4» не может изменить свое положение и совершить «прыжок» в другую более удобную для посадки зону.
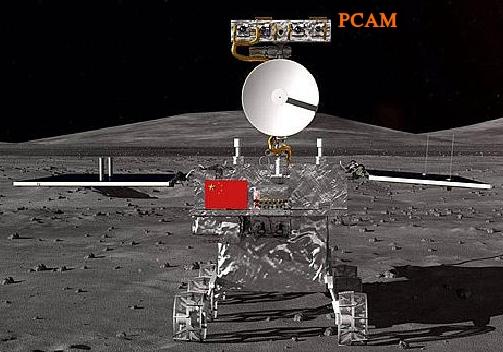
На ровере «Юйту-2» установлена двойная панорамная камера (Panoramic camera — PCAM).
Панорамная камера PCAM (0.69 кг, размер 90×110х120 мм) установлена в самой верхней точке ровера «Юйту-2» на специальном широком кронштейне-мачте, который позволяет камере поворачиваться на 360 градусов вокруг своей оси для возможности фотофиксации панорамного вида поверхности.
Так как камера состоит из двух одинаковых модулей, то с их помощью составляется 3D-изображение, используя метод бинокулярного стереовидения. Для получения цветного изображения в камере PCAM используется фильтр Байера (массивов цветных фильтров).
Характеристики панорамной камеры PCAM:
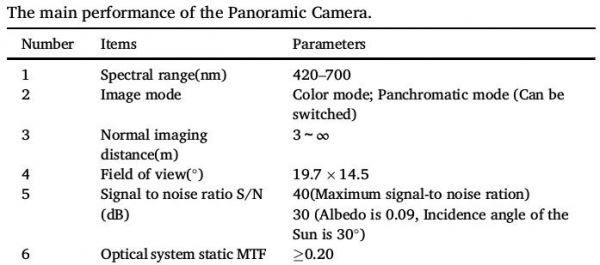
Схема связи элементов панорамной камеры PCAM:
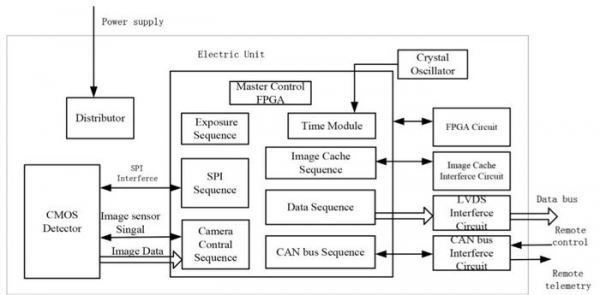
Общий вид панорамы поверхности с ровера «Юйту-2»:
Камера PCAM на ровере:
3 января 2019 года, после окончания всех этапов процедуры успешной посадки и установки независимых каналов связи с аппаратами «Чанъэ-4» (посадочным модулем и ровером), началась эра фото исследования обратной стороны Луны.
Фотографии с камер аппаратов:
Landing camera LCAM:
Terrain camera TCAM:
Panoramic camera PCAM (ровер):
Ровер «Юйту-2» является мобильным и очень продуктивным космическим партнером посадочного модуля «Чанъэ-4».
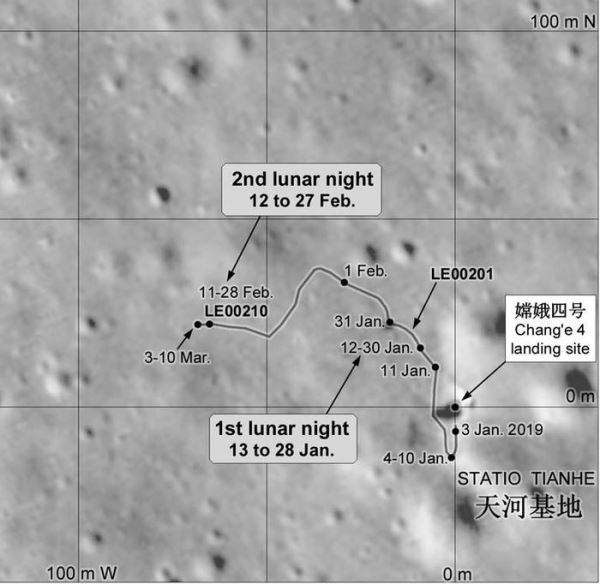
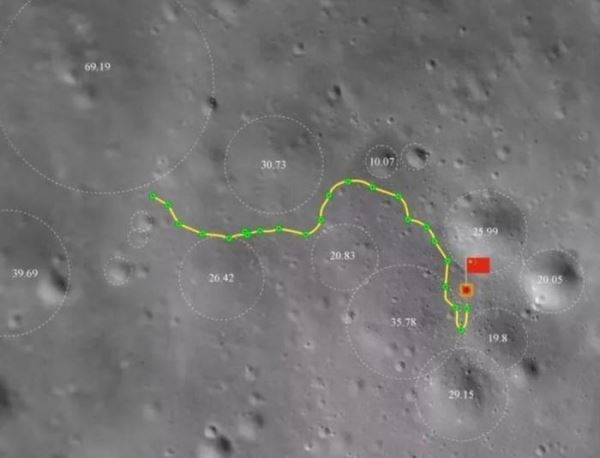
Ровер «Юйту-2» проехал более 160 метров по сложной поверхности обратной стороны Луны.
Путь ровера «Юйту-2» за три лунных дня:
Интересно, как работают передние колеса на ровере «Юйту-2» при повороте на месте:


Поскольку обратная сторона Луны также имеет более сложный рельеф, чем видимая с Земли сторона, то в процессе движения по поверхности ровер «Юйту-2» столкнулся с более серьезными двигательными проблемами и помехами, по сравнению с теми, с которыми ранее сталкивался его предшественник ровер «Юйту», отправленный на Лунную поверхность в декабре 2013 году.
К сожалению, первый ровер «Юйту» миссии «Чанъэ-3», 25 января 2014 года был технически обездвижен (поломка элементов в результате столкновения) после преодоления 114,8 метра по сложной лунной поверхности.
Лунная поверхность в зоне высадки посадочного модуля «Чанъэ-4» изобилует складками, многочисленными камушками и небольшими кратерами, после совершения каждого своего небольшого движения, ровер «Юйту-2» должен остановиться, сфотографировать поверхность вокруг и отправить эти данные обратно на Землю через спутник-ретранслятор.

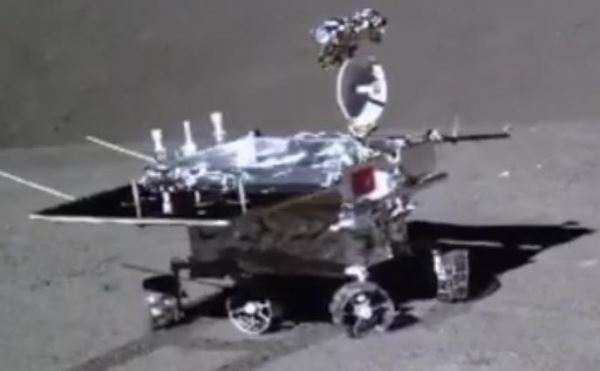
Шестиколесный ровер «Юйту-2»:
- общая масса ровера составляет около 140 кг (310 фунтов);
- грузоподъемность — около 20 кг (44 фунта);
- может перемещаться по наклонам и имеет автоматические датчики, предотвращающие столкновение с другими объектами;
- электроэнергией ровер обеспечивается с помощью двух солнечных батарей, позволяющих роверу работать в течение лунного дня;
- максимальная скорость 200 метров в час (данную скорость на Луне все равно не достигнуть – так как элементы на поверхности не дадут разогнаться и выведут из строя ровер раньше);
- максимальная площадь исследования – 3 кв. км;
- расчетное время работы – 3 месяца (2160 часов);
- максимальная расчетная дистанция – 10 км.

Однако, если ровер «Юйту-2» перевернется, то он не сможет снова вернуться в рабочее положение. Солнечные панели на бортах лунного ровера очень хрупкие, они могут треснуть или покрыться пылью после падения, что приведет их в негодность.

В качестве программируемых логических интегральных схем (ПЛИС/FPGA) используются: массив из шести XILINX XQR2V3000-4CCG717 (Radiation-Hardened QPro Virtex-II FPGA).
Для дополнительной защиты микросхем от радиации используются алюминиевые экраны толщиной не менее 3.8 мм.
Схемы связи и передачи данных оборудования на посадочном модуле «Чанъэ-4»:

где:
— LPR — Lunar Penetrating Radar;
— ASAN — Advanced Small Analyzer for Neutrals;
— VNIS — Visible and Near-Infrared Imaging Spectrometer;
— PCAM — Panoramic Camera.
Кстати, ранее в публикациях уже рассказал о почти всем научном оборудовании спускаемого модуля и ровера, только один научный прибор остался еще инкогнито — LPR (Lunar penetrating radar) – который можно увидеть внешне, как два «усика» сзади на ровере.
Постараюсь об этом интересном устройстве еще написать отдельно публикацию.



